di Sabina Simeone @sabinasimeone
I robot comunicano tra loro, si muovono insieme, evitano gli ostacoli. Sono progettati per il monitoraggio ambientale, l’ispezione di scafi, la sicurezza, l’oceanografia e archeologia sub.
 Gli studiosi Silvello Betti dell’università di Roma Tor Vergata e Vincenzo Nanni dell’Enea, impegnati nello studio delle reti di comunicazione sottomarine ad alte prestazioni per sciami densi di robot, hanno preso parte al seminario “Le tecnologie di comunicazione a tutela delle acque marine ed interne: ricerca ed attualità” del Ministero dello Sviluppo Economico, che si è tenuto questa mattina al Padiglione Aquae di Expo Venice 2015.
Gli studiosi Silvello Betti dell’università di Roma Tor Vergata e Vincenzo Nanni dell’Enea, impegnati nello studio delle reti di comunicazione sottomarine ad alte prestazioni per sciami densi di robot, hanno preso parte al seminario “Le tecnologie di comunicazione a tutela delle acque marine ed interne: ricerca ed attualità” del Ministero dello Sviluppo Economico, che si è tenuto questa mattina al Padiglione Aquae di Expo Venice 2015.
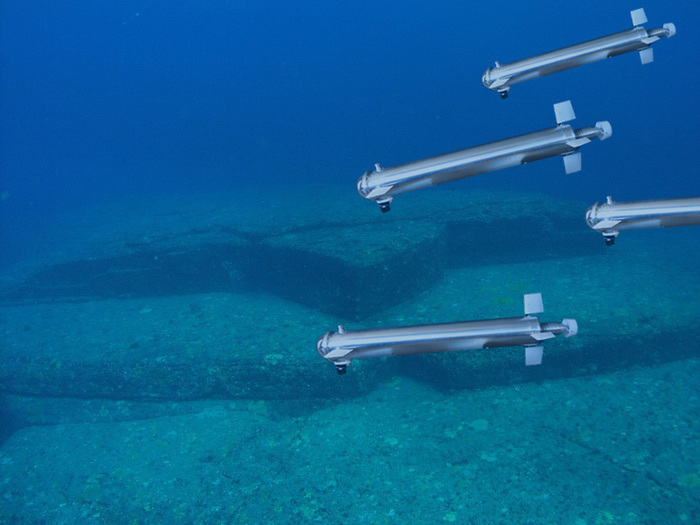
Il Dipartimento di Ingegneria Elettronica dell’Università di Roma Tor Vergata collabora da tempo con il Laboratorio di Robotica dell’ENEA per lo sviluppo di nuove tecnologie sottomarine di monitoraggio e controllo delle acque costiere e oceaniche. I robot comunicano tra loro, si muovono insieme, avvertono ed evitano gli ostacoli. Sono progettati per il monitoraggio ambientale, l’ispezione di scafi, la sicurezza, l’oceanografia e archeologia sub.
Il prototipo di robot si chiama Venus e forma lo sciame assieme ai suoi simili: uno sciame è tale dalle 10 unità in su. Raggiunge la profondità massima di 100 metri, pesa 50 kg e raggiunge la velocità di 2 nodi. La sua autonomia di lavoro è di circa 3 ore.
“I sistemi di comunicazione wireless sottomarini rivestono un’importanza particolare in relazione alla necessità di coordinare il comportamento degli sciami di robot – ha sottolineato il prof. Betti – La rete deve essere infatti caratterizzata da prestazioni molto superiori a quelle consentite dai modem acustici attualmente disponibili, che sono stati pensati per collegare unità di superficie con singoli scafi immersi a distanze che possono raggiungere anche alcuni chilometri, e per tale motivo è stato sviluppato un sistema specializzato molto avanzato, lo SWAN-SAR (SWArm Networking – Short Acoustic Range), attualmente in fase di collaudo”.
“Il canale acustico, per quanto sfruttato su frequenze molto più elevate di quelle usuali, grazie alla ridotta distanza tra i robot che navigano a pochi metri di distanza uno dall’altro, non rappresenta tuttavia l’unica tematica di telecomunicazioni su cui si sta lavorando in questo ambito e il team di ricerca si è orientato verso lo sviluppo, attualmente in corso, di un sistema ibrido, multicanale (ottico e acustico), che sfrutta la stretta sinergia tra i canali fisici utilizzati e, di nuovo, la ridotta distanza. Queste condizioni consentono infatti la propagazione del segnale ottico mediante il sistema SWAN-OTR (SWArm Networking – Optical Transmitter Receiver), anche in virtù del rapido miglioramento delle prestazioni e dell’efficienza di emissione dei dispositivi optoelettronici.
Grazie all’impiego della tecnologia ibrida e a protocolli di comunicazione molto sofisticati, si prevede di ottenere delle prestazioni che potranno raggiungere valori di megabit/sec sia all’interno dello sciame che verso la superficie.
L’impiego di sciami di AUV (robot denominati Autonomous Underwater Vehicles) nel controllo e nell’ispezione dei fondali di zone costiere e di acque oceaniche offre grandissimi vantaggi rispetto all’utilizzo di sistemi robotici singoli e sofisticati, ma molto costosi, e stimola la risoluzione di problemi di progettazione che sono, in parte, obiettivi di ricerca.
ENEA e Università di Roma Tor Vergata stanno quindi lavorando a un caso particolare di sciame robotico che è stato chiamato sciame denso: in questo caso i singoli robot, o nodi di una rete, si trovano a distanze di metri o decine di metri tra di loro rispetto alle centinaia di metri che sono la distanza tipica delle attuali applicazioni robotiche. Ciò introduce degli elementi addizionali nella realizzazione dei sistemi di controllo e telecomunicazione grazie alla disponibilità di canali di comunicazione fisici più affidabili e più veloci rispetto ai casi tradizionali.
Le applicazioni degli sciami densi spaziano dal controllo dell’ecologia dei sistemi marini, che può essere effettuato con elevato livello di dettaglio proprio per le caratteristiche degli sciami stessi, fino alla sorveglianza di infrastrutture sensibili.
Un ulteriore ambito verso il quale il laboratorio sta svolgendo studi preliminari vista la potenzialità del sistema è relativo alla cosiddetta tematica del “search and rescue” che potrebbe essere di grande utilità in relazione agli attuali problemi nella gestione dei flussi migratori sul mare.
Per quanto riguarda poi gli aspetti legati alla vita marina e al suo utilizzo anche in termini di alimentazione umana, ENEA e Università di Roma Tor Vergata stanno inoltre preparando congiuntamente una proposta di progetto europeo per lo studio dell’interazione tra sistemi robotici e banchi di pesci anche nell’ottica del miglioramento delle condizioni di salute e di benessere generale degli allevamenti di itticoltura.